Controllers are tuned in an effort to match the characteristics of the
control equipment to the process so that two goals are achieved:
is the foundation of process control measurement in that electricity:






OPEN LOOP ANALYSIS
control equipment to the process so that two goals are achieved:
is the foundation of process control measurement in that electricity:
- The system responds quickly to errors.
- The system remains stable (PV does not oscillate around the SP).
GAIN
Controller tuning is performed to adjust the manner in which a control
valve (or other final control element) responds to a change in error.
In particular, we are interested in adjusting the gain of the controller
such that a change in controller input will result in a change in
Gain is defined simply as the change in output divided by the change
in input.
Examples:
Change in Input to Controller - 10%
Change in Input to Controller - 10%
Change in Controller Output - 5%
Gain = 5% / 10% = 0.5
convey measurements and instructions to other instruments in a
control loop to maintain the highest level of safety and efficiency.
The next three sections in this module discuss electricity, circuits,
transmitters, and signals in greater detail so you can understand the
importance of electricity in process control.
controller output that will, in turn, cause sufficient change in
valve position to eliminate error, but not so great a change as
to cause instability or cycling.
Change in Controller Output - 20%
Gain = 20% / 10% = 2
Gain Plot - The Figure below is simply another graphical way of
representing the concept of gain.
Gain Kc =D Output % / D Input %


PROPORTIONAL ACTION
The proportional mode is used to set the basic gain value of the
controller. The setting for the proportional mode may be expressed
as either:
1. Proportional Gain
2. Proportional Band
proportional gain.
Proportional Gain (Kc) answers the question:
"What is the percentage change of the controller output relative to the
percentage change in controller input?"
Proportional Gain is expressed as:
Gain, (Kc) = DOutput% /DInput %
PROPORTIONAL BAND
Proportional Band (PB) is another way of representing the same
information and answers this question:
"What percentage of change of the controller input span will cause a
100% change in controller output?"
PB = DInput (% Span) For 100%DOutput
Converting Between PB and Gain
A simple equation converts gain to proportional Band:
added.
PB = 100/Gain
Also recall that:
Gain = 100%/PB
Proportional Gain, (Kc) = DOutput% / DInput %
PB= DInput(%Span) For 100%DOutput

LIMITS OF PROPORTIONAL ACTION
Responds Only to a Change in error - Proportional action responds
only to a change in the magnitude of the error.
Does Not Return the PV to Setpoint - Proportional action will not
return the PV to setpoint. It will, however, return the PV to a value
that is within a defined span (PB) around the PV.
DETERMINING THE CONTROLLER OUTPUT
Controller Output - In a proportional only controller, the output is a
function of the change in error and controller gain.
Output Change, % = (Error Change, %) (Gain)
Example: If the setpoint is suddenly changed 10% with a proportional
band setting of 50%, the output will change as follows:
Calculating Controller Output
DController Output = DInput, % X Gain
Gain = 100%/PB
EXAMPLE
DInput = 10%
PB = 50%, so Gain = 100%/50% = 2
DController Output = D Input X Gain
DController Output = 10% X 2 = 20%
Expressed in Units:
Controller Output Change = (0.2)(12 psi span) = 2.4 psi OR
(0.2)(16 mA span) = 3.2 mA
PROPORTIONAL ACTION - CLOSED LOOP
Loop Gain - Every loop has a critical or natural frequency. This is the
frequency at which cycling may exist. This critical frequency is
Low Gain Example - In the example below, the proportional band is
high (gain is low). The loop is very stable, but an error remains between
SP and PV.
determined by all of the loop components. If the loop gain is too high
at this frequency, the PV will cycle around the SP; i.e., the process
will become unstable.

High Gain Example - In the example, the proportional band is
small resulting in high gain, which is causing instability. Notice that
the process variable is still not on set point.

Proportional Summary - For the proportional mode, controller output
is a function of a change in error. Proportional band is expressed in
terms of the percentage change in error that will cause 100% change in
controller output. Proportional gain is expressed as the percentage
change in output divided by the percentage change in input.
PB = (DInput, % / DOutput, % ) x 100 = 100/Gain
Gain= DInput % / DOutput %
D Controller Output = (Change in Error)(Gain)
1. Proportional Mode Responds only to a change in error
2. Proportional mode alone will not return the PV to SP.
Advantages - Simple
Disadvantages - Error
Settings - PB settings have the following effects:
Small PB (%) Minimize Offset
High Gain (%) Possible cycling
Large PB (%) Large Offset
Low Gain Stable Loop
Tuning - reduce PB (increase gain) until the process cycles following
a disturbance, then double the PB (reduce gain by 50%).
INTEGRAL ACTION

Duration of Error and Integral Mode - Another component of error
is the duration of the error, i.e., how long has the error existed?
The controller output from the integral or reset mode is a function of
the duration of the error.
OPEN LOOP ANALYSIS
Purpose- The purpose of integral action is to return the PV to SP. This is
accomplished by repeating the action of the proportional mode as
long as an error exists. With the exception of some electronic
controllers, the integral or reset mode is always used with the
proportional mode.
Setting - Integral, or reset action, may be expressed in terms of:
Repeats Per Minute - How many times the proportional
action is repeated each minute.
Minutes Per Repeat - How many minutes are required for
1 repeat to occur.
CLOSED LOOP ANALYSIS
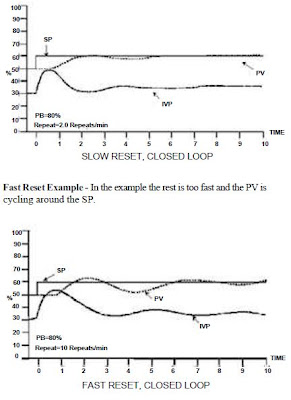
Closed Loop With Reset - Adding reset to the controller adds one more
gain component to the loop. The faster the reset action, the greater
the gain.
Slow Reset Example - In this example the loop is stable because
the total loop gain is not too high at the loop critical frequency.
Notice that the process variable does reach set point due to the reset
action.
RESETWINDUP
Defined - Reset windup is described as a situation where the controller
output is driven from a desired output level because of a large
difference between the set point and the process variable.

Shutdown - Reset windup is common on shut down because the
process variable may go to zero but the set point has not changed,
therefore this large error will drive the output to one extreme.

Startup - At start up, large process variable overshoot may occur
because the reset speed prevents the output from reaching its desired
value fast enough.
Anti Reset Windup - Controllers can be modified with an anti-reset
windup (ARW) device. The purpose of an anti-reset option is to allow
the output to reach its desired value quicker, therefore minimizing
the overshoot.
Fast Reset (Large Repeats/Min.,Small Min./Repeat)
1.High Gain
2.Fast Return To Setpoint
3.Possible Cycling
Slow Reset(Small Repeats/Min.,Large Min./Repeats)
1.Low Gain
2.Slow Return To Setpoint
3.Stable Loop
Trailing and Error Tuning - Increase repeats per minute until the
PV cycles following a disturbance, then slow the reset action to a
value that is 1/3 of the initial setting.
SUMMARY
Integral (Reset) Summary - Output is a repeat of the proportional
action as long as error exists. The units are in terms of repeats per
minute or minutes per repeat.
Advantages - Eliminates error
Disadvantages - Reset windup and possible overshoot
DERIVATIVE ACTION
Derivative Mode Basics - Some large and/or slow process do not
The derivative action is initiated whenever there is a change in the
rate of change of the error (the slope of the PV). The magnitude of
the derivative action is determined by the setting of the derivative . The
respond well to small changes in controller output. For example,
a large liquid level process or a large thermal
process (a heat exchanger) may react very slowly to a small change
in controller output. To improve response, a large initial change in
controller output may be applied. This action is the role of the
derivative mode.
mode of a PID controller and the rate of change of the PV. The
Derivative setting is expressed in terms of minutes. In oper ation, the
the controller first compares the current PV with the last value of the
PV. If there is a change in the slope of the PV, the controller
etermines what its output would be at a future point in time
(the future point in time is determined by the value of the derivative
setting, in minutes). The derivative mode immediately increases
the output by that amount.

Example - Let's start a closed loop example by looking at a
temperature control system. IN this example, the time scale has been
lengthened to help illustrate controller actions in a slow process.
Rate Effect - To illustrate the effect of rate action, we will add the
are mode with a setting of 1 minute. Notice the very large controller
output at time 0. The output spike is the result of rate action. Recall
Assume a proportional band settingof 50%. There is no reset at
this time. The proportional gain of 2 acting on a 10% change in set
pint results in a change in controller output of 20%. Because
temperature is a slow process the setting time after a change in error
is quite long. And, in this example, the PV never becomes equal to
the SP because there is no reset.
that the change in output due to rate action is a function of the speed
(rate) of change of error, which in a step is nearly infinite. The
addition of rate alone will not cause the process variable to match the
set point.

Effect of Fast Rate - Let's now increase the rate setting to 10 minutes.
The controller gain is now much higher. As a result, both the IVP
(controller output) and the PV are cycling. The point here is that
increasing the rate setting will not cause the PV to settle at the SP.

Need for Reset Action - It is now clear that reset must be added to
bring process variable back to set point
Applications - Because this component of the controller output is
dependent on the speed of change of the input or error, the output
will be very erratic if rate is used on fast process or one with noisy
signals. The controller output, as a result of rate, will have the
greatest change when the input changes rapidly.
Controller Option to Ignore Change in SP - Many controllers,
especially digital types, are designed to respond to changes in the PV
only, and to ignore changes in SP. This feature eliminates a major upset
upset that would occur following a change in the setpoint.
SUMMARY
Derivative (Rate) Sumary - Rate action is a function of the speed of
change of the error. The units are minutes. The action is to apply an
immediate response that is equal to the proportional plus reset action
that would have occurred some number of minutes I the future.
Advantages - Rapid output reduces the time that is required to return
PV to SP in slow process.
Disadvantage - Dramatically amplifies noisy signals; can cause
cycling in fast processes.
Settings
Large (Minutes)
1.High Gain
2.Large Output Change
3.Possible Cycling
Small (Minutes)
1.Low Gain
2.Small Output Change
3.Stable Loop
Trial-and-Error Tuning
Increase the rate setting until the process cycles following a
disturbance, then reduce the rate setting to one-third of the initial
value.
CLOSED LOOP ANALYSIS
Closed Loop With Reset - Adding reset to the controller adds one more
gain component to the loop. The faster the reset action, the greater
the gain.
Slow Reset Example - In this example the loop is stable because
the total loop gain is not too high at the loop critical frequency.
Notice that the process variable does reach set point due to the reset
action.

RESETWINDUP
Defined - Reset windup is described as a situation where the controller
output is driven from a desired output level because of a large
difference between the set point and the process variable.

Shutdown - Reset windup is common on shut down because the
process variable may go to zero but the set point has not changed,
therefore this large error will drive the output to one extreme.

Startup - At start up, large process variable overshoot may occur
because the reset speed prevents the output from reaching its desired
value fast enough.
Anti Reset Windup - Controllers can be modified with an anti-reset
windup (ARW) device. The purpose of an anti-reset option is to allow
the output to reach its desired value quicker, therefore minimizing
the overshoot.
Fast Reset (Large Repeats/Min.,Small Min./Repeat)
1.High Gain
2.Fast Return To Setpoint
3.Possible Cycling
Slow Reset(Small Repeats/Min.,Large Min./Repeats)
1.Low Gain
2.Slow Return To Setpoint
3.Stable Loop
Trailing and Error Tuning - Increase repeats per minute until the
PV cycles following a disturbance, then slow the reset action to a
value that is 1/3 of the initial setting.
SUMMARY
Integral (Reset) Summary - Output is a repeat of the proportional
action as long as error exists. The units are in terms of repeats per
minute or minutes per repeat.
Advantages - Eliminates error
Disadvantages - Reset windup and possible overshoot
DERIVATIVE ACTION
Derivative Mode Basics - Some large and/or slow process do not
The derivative action is initiated whenever there is a change in the
rate of change of the error (the slope of the PV). The magnitude of
the derivative action is determined by the setting of the derivative . The
respond well to small changes in controller output. For example,
a large liquid level process or a large thermal
process (a heat exchanger) may react very slowly to a small change
in controller output. To improve response, a large initial change in
controller output may be applied. This action is the role of the
derivative mode.
mode of a PID controller and the rate of change of the PV. The
Derivative setting is expressed in terms of minutes. In oper ation, the
the controller first compares the current PV with the last value of the
PV. If there is a change in the slope of the PV, the controller
etermines what its output would be at a future point in time
(the future point in time is determined by the value of the derivative
setting, in minutes). The derivative mode immediately increases
the output by that amount.

Example - Let's start a closed loop example by looking at a
temperature control system. IN this example, the time scale has been
lengthened to help illustrate controller actions in a slow process.
Rate Effect - To illustrate the effect of rate action, we will add the
are mode with a setting of 1 minute. Notice the very large controller
output at time 0. The output spike is the result of rate action. Recall
Assume a proportional band settingof 50%. There is no reset at
this time. The proportional gain of 2 acting on a 10% change in set
pint results in a change in controller output of 20%. Because
temperature is a slow process the setting time after a change in error
is quite long. And, in this example, the PV never becomes equal to
the SP because there is no reset.
that the change in output due to rate action is a function of the speed
(rate) of change of error, which in a step is nearly infinite. The
addition of rate alone will not cause the process variable to match the
set point.

Effect of Fast Rate - Let's now increase the rate setting to 10 minutes.
The controller gain is now much higher. As a result, both the IVP
(controller output) and the PV are cycling. The point here is that
increasing the rate setting will not cause the PV to settle at the SP.

Need for Reset Action - It is now clear that reset must be added to
bring process variable back to set point
Applications - Because this component of the controller output is
dependent on the speed of change of the input or error, the output
will be very erratic if rate is used on fast process or one with noisy
signals. The controller output, as a result of rate, will have the
greatest change when the input changes rapidly.
Controller Option to Ignore Change in SP - Many controllers,
especially digital types, are designed to respond to changes in the PV
only, and to ignore changes in SP. This feature eliminates a major upset
upset that would occur following a change in the setpoint.
SUMMARY
Derivative (Rate) Sumary - Rate action is a function of the speed of
change of the error. The units are minutes. The action is to apply an
immediate response that is equal to the proportional plus reset action
that would have occurred some number of minutes I the future.
PV to SP in slow process.
Disadvantage - Dramatically amplifies noisy signals; can cause
cycling in fast processes.
Settings
Large (Minutes)
1.High Gain
2.Large Output Change
3.Possible Cycling
Small (Minutes)
1.Low Gain
2.Small Output Change
3.Stable Loop
Trial-and-Error Tuning
Increase the rate setting until the process cycles following a
disturbance, then reduce the rate setting to one-third of the initial
value.











0 comments:
Post a Comment